- EN7068 Leadership, Stakeholders and Data Analytics Coursework Brief 2026
- ENGE2003 Engineering Project Management Coursework 2, 2026 | DMU
- 55-500223 Analogue and Digital Electronic Design Coursework Brief 2026 | SHU
- EGR9017 Power Systems Assessment Coursework 1 Brief 2026 | University of Lincoln
- 7BIOM037W Systems Biology Coursework 1 Report 2026 | University of Westminster
- NCFE CACHE Level 3 Unit 8 Professional Practice Portfolio 1 Coursework 2026
- NCFE CACHE Level 3 Unit 9 Supporting Emergent literacy Coursework 2026
- 6WBS0035/ 6WBS0036 Digital Economy CW1 Assignment Brief 2026 | UOH
- DSM060 Data Science Research Topics Coursework Assignment 2026 | UOL
- BARC0087 Structures Materials & Forming Techniques Coursework 2026 | UCL
- LL5306 Commercial Law Assessment Coursework Brief 2026 | Kingston University
- M22319 / M33098 Numerical Skills & Economics Assessment Coursework | UOP
- BMG872 Global Strategy Development and Implementation Individual Assignment CWK Brief 2026
- LLB020N204A Law of Property Assessment Coursework Brief 2026
- BS3397 Microeconometrics Coursework Assignment Brief 2026 | AU
- UMAD47-15-M Managing Finance Assessment Coursework Brief | UWE
- BST851 Business Data Analytics Assessment Coursework 2026
- MMM143 International Business and the World Economy Coursework 2026
- EMS402U Engineering Design Coursework Project Report 2026 | QMUL
- 25BSC565 Fundamentals of Strategic Management Coursework Brief
EENG8760: This stretch of river can be modeled using a pure time delay model The transfer function of a pure time delay model in the Laplace: Advanced Control Systems Coursework, UOK, UK
| University | University of kent (UOK) |
| Subject | EENG8760: Advanced Control Systems |
Question 1
(a) This stretch of river can be modeled using a pure time delay model. The transfer function of a pure time delay model in the Laplace domain is given by
![]()
Let the time delay be r = 25 hours and assume the sampling interval, 7’s= 5 hours. Obtain the discrete state-space representation for this pure time delay model. State clearly the A, B, C, and D matrices. Show your detailed calculation.
(b) After you have obtained the discrete state-space model, augment the plant with the disturbance model using the following equations.
![]()
with 0 and I am respectively zero and identity matrices of appropriate size.
Question 2
(a) In Figure 1, the discrete transfer function of the integral controller, C(z) used to regulate the flow at Casey’s Weir is given by
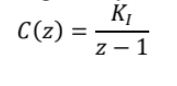
Let K, = 0.05, obtain the discrete state-space representation of this integral controller. Label the integral controller’s matrices as A1<, BK, CK, and DK.
(b) The city council require that the flow at Gowangardie Weir must be maintained at a minimum flow of 0.3m3/s for environmental purposes.
Suppose that the base flow of this river reach is at 0.6m3/s. Using the provided Simulink file, “Simulink ReachCG.sli’, let us assume farmers located close to Gowangardie Weir have a requirement to withdraw water from 105 hours onwards at 0.4 m3/s.
The integral controller is given in Question 2a) is to be used to restore the flow at Gowangardie Weir.
Question 3
(a) Given the imposed flow constraint, a Model Predictive Controller (MPC) has been proposed to replace the integral controller, as MPC has the potential to yield improved performance in the presence of constraints.
However, tuning the weighting matrices in the MPC cost function is often non-trivial.
One method to obtain the weighting matrices is to solve an inverse optimal control problem. In other words, we select a favorite controller Krav that is easy to tune and subsequently obtain MPC weighting matrices that can mimic Kfav by solving the inverse optimal control problem.
Using the full order observer method introduced in 7165MAA lecture week 5, obtain the weighting matrices (i.e. Q. R and S) that reproduce Kfav, i.e. the integral-controller given in Question 2 a). Show your detailed calculation.
(b) Run your updated “mpc ReachCG.nt, to design the MPC controller using the MPC weighting matrices obtained using the full state observer method, as computed in Question 3(a). Use a prediction horizon of 10. Compare and comment on the results of the MPC controller with those obtained using the integral controller simulated in Question 2(b), in the absence of constraints.
(c) Impose the output flow constraint set by the city council given in Question 2(b) in your MPC simulation. Critically assess and compare the performance of the MPC and I controllers.
(d) For MPC, in the presence of the output flow constraint, critically assess and compare the performance for the prediction horizon parameter set to 2, 5, and 10.
Do You Need Assignment of This Question
Looking for the best assignment writing online on EENG8760: Advanced Control Systems? then consult the experts of Students Assignment Help UK where our brilliant experts assist you to provide error-free and 100% plagiarism-free solutions on BTEC Assignment Help at a most reasonable price.
Answer